| Authors: | N. Jeffrey, F. B. Abdalla, O. Lahav, F. Lanusse, J.-L. Starck, et al |
| Journal: | |
| Year: | 01/2018 |
| Download: | ADS| Arxiv |
Abstract
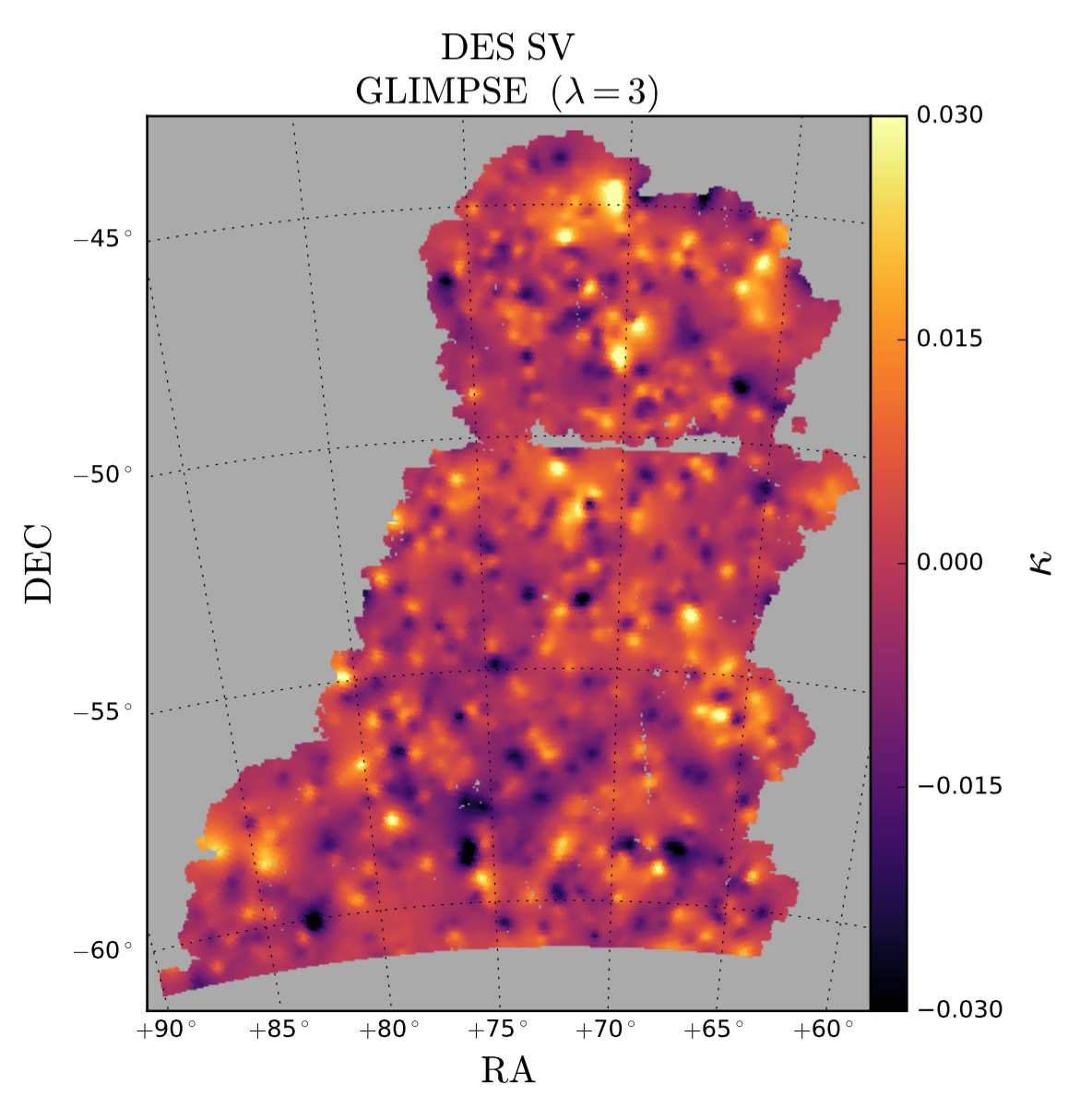
Mapping the underlying density field, including non-visible dark matter, using weak gravitational lensing measurements is now a standard tool in cosmology. Due to its importance to the science results of current and upcoming surveys, the quality of the convergence reconstruction methods should be well understood. We compare three different mass map reconstruction methods: Kaiser-Squires (KS), Wiener filter, and GLIMPSE. KS is a direct inversion method, taking no account of survey masks or noise. The Wiener filter is well motivated for Gaussian density fields in a Bayesian framework. The GLIMPSE method uses sparsity, with the aim of reconstructing non-linearities in the density field. We compare these methods with a series of tests on the public Dark Energy Survey (DES) Science Verification (SV) data and on realistic DES simulations. The Wiener filter and GLIMPSE methods offer substantial improvement on the standard smoothed KS with a range of metrics. For both the Wiener filter and GLIMPSE convergence reconstructions we present a 12% improvement in Pearson correlation with the underlying truth from simulations. To compare the mapping methods' abilities to find mass peaks, we measure the difference between peak counts from simulated {\Lambda}CDM shear catalogues and catalogues with no mass fluctuations. This is a standard data vector when inferring cosmology from peak statistics. The maximum signal-to-noise value of these peak statistic data vectors was increased by a factor of 3.5 for the Wiener filter and by a factor of 9 using GLIMPSE. With simulations we measure the reconstruction of the harmonic phases, showing that the concentration of the phase residuals is improved 17% by GLIMPSE and 18% by the Wiener filter. We show that the correlation between the reconstructions from data and the foreground redMaPPer clusters is increased 18% by the Wiener filter and 32% by GLIMPSE.

